




+





<
>
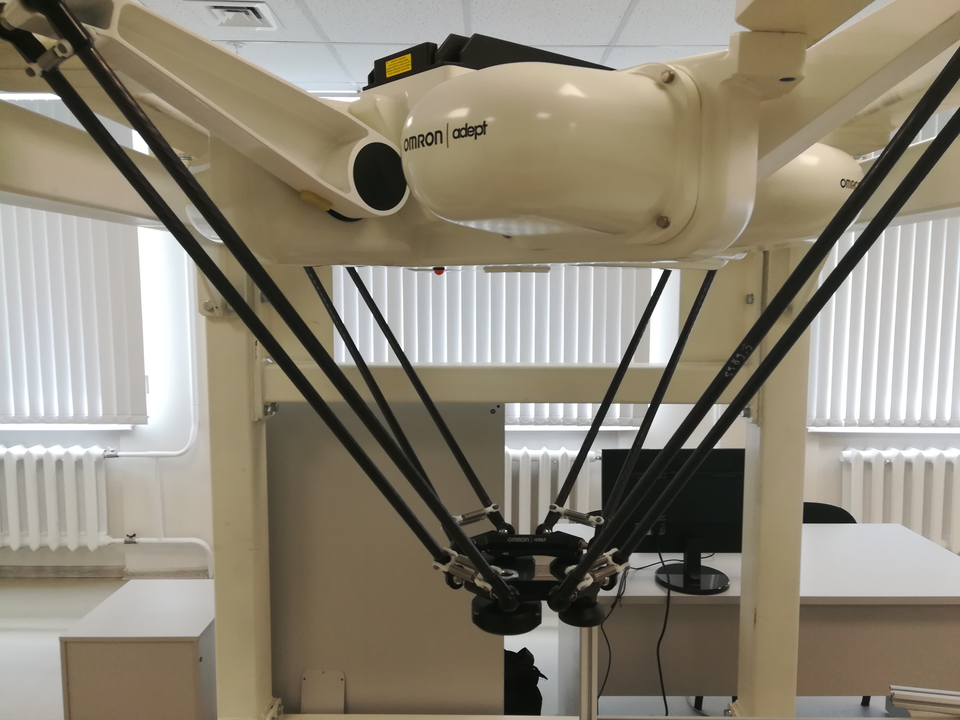
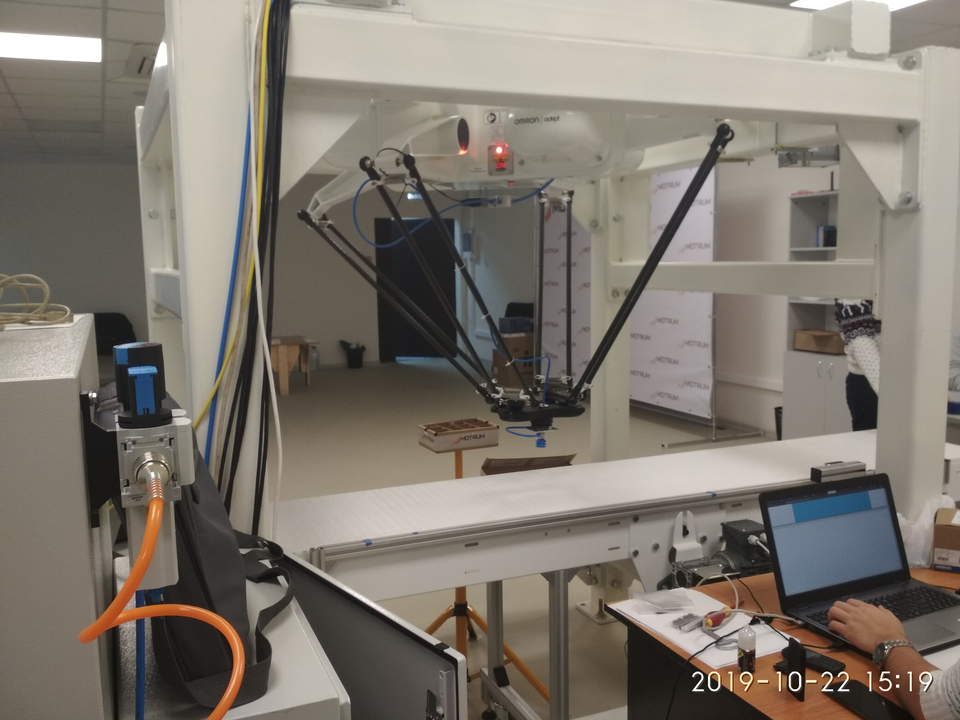
В 2018 году, являясь дистрибутором и интегратором японского производителя робототехники OMRON, сделали собственную лабораторию с промышленным роботом дельта серии Quattro.
Перед лабораторией стояла задача – разрабатывать и апробировать новые решения в области захвата и перемещения различных видов продукции.
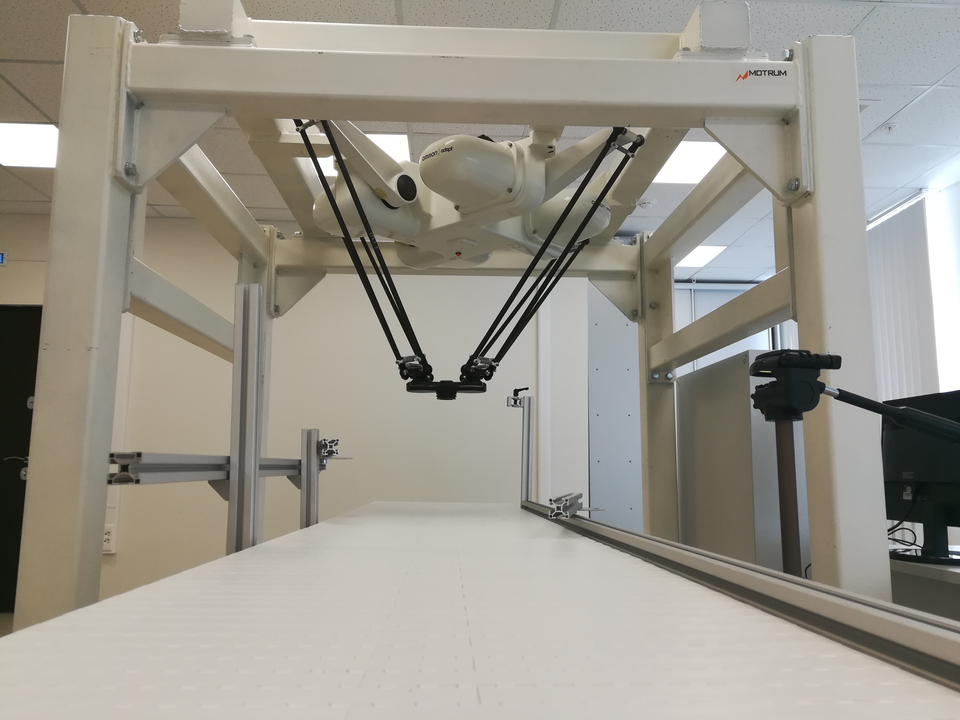
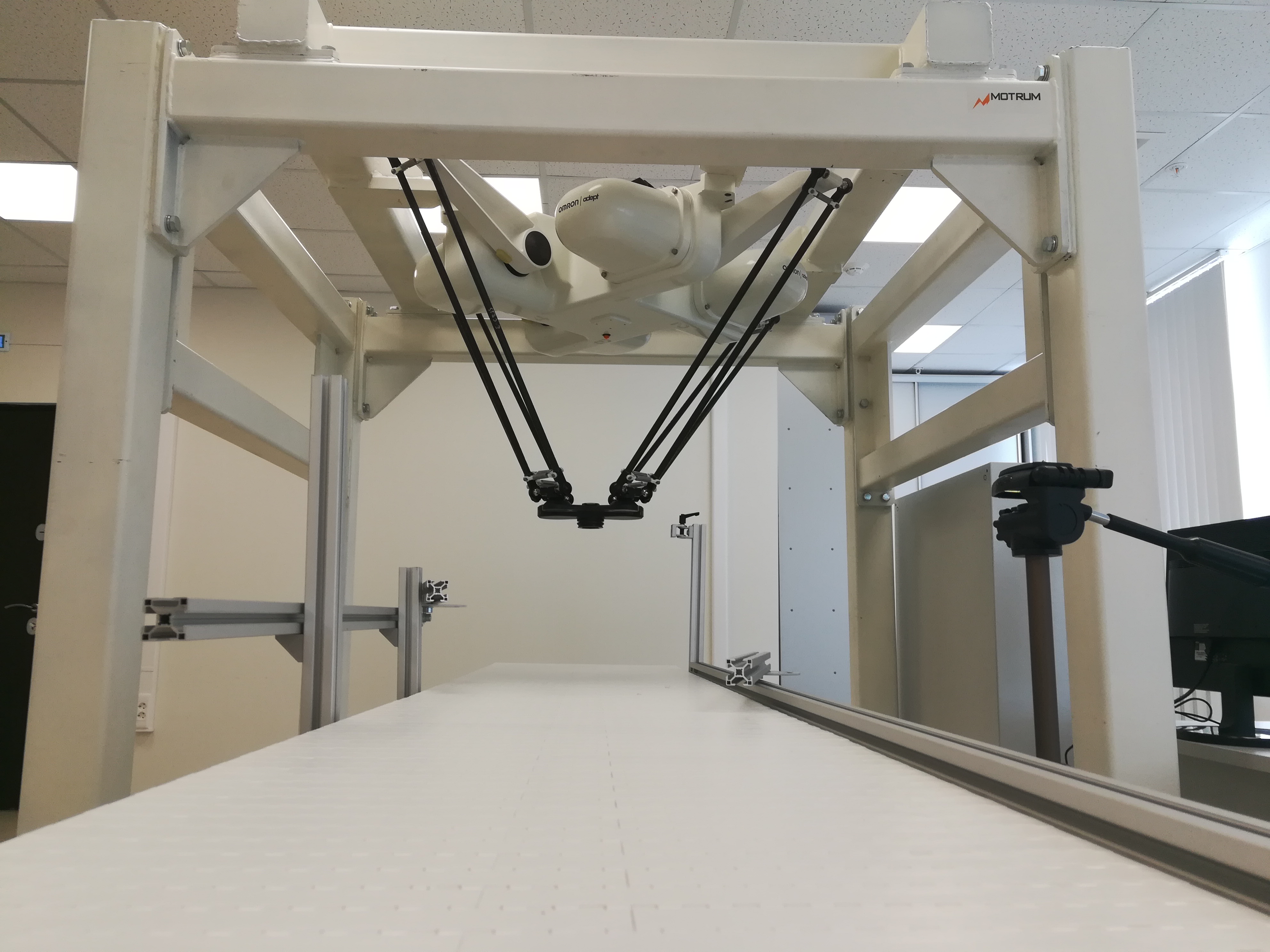
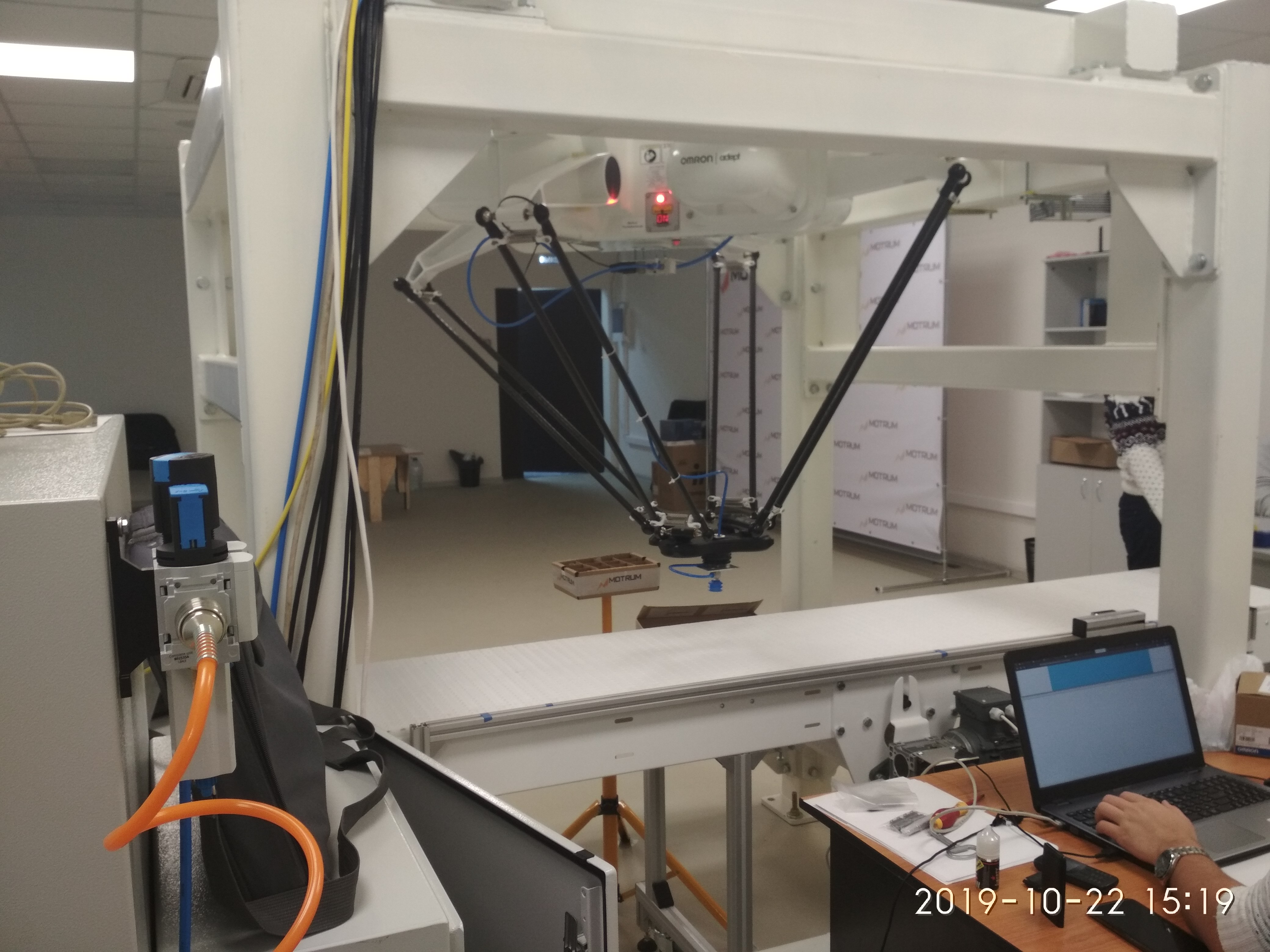
Для этого наши конструкторы спроектировали приводной многофункциональный конвейер с регулировкой скорости, обратной связью, возможностью менять угол подачи и ширину подачи.
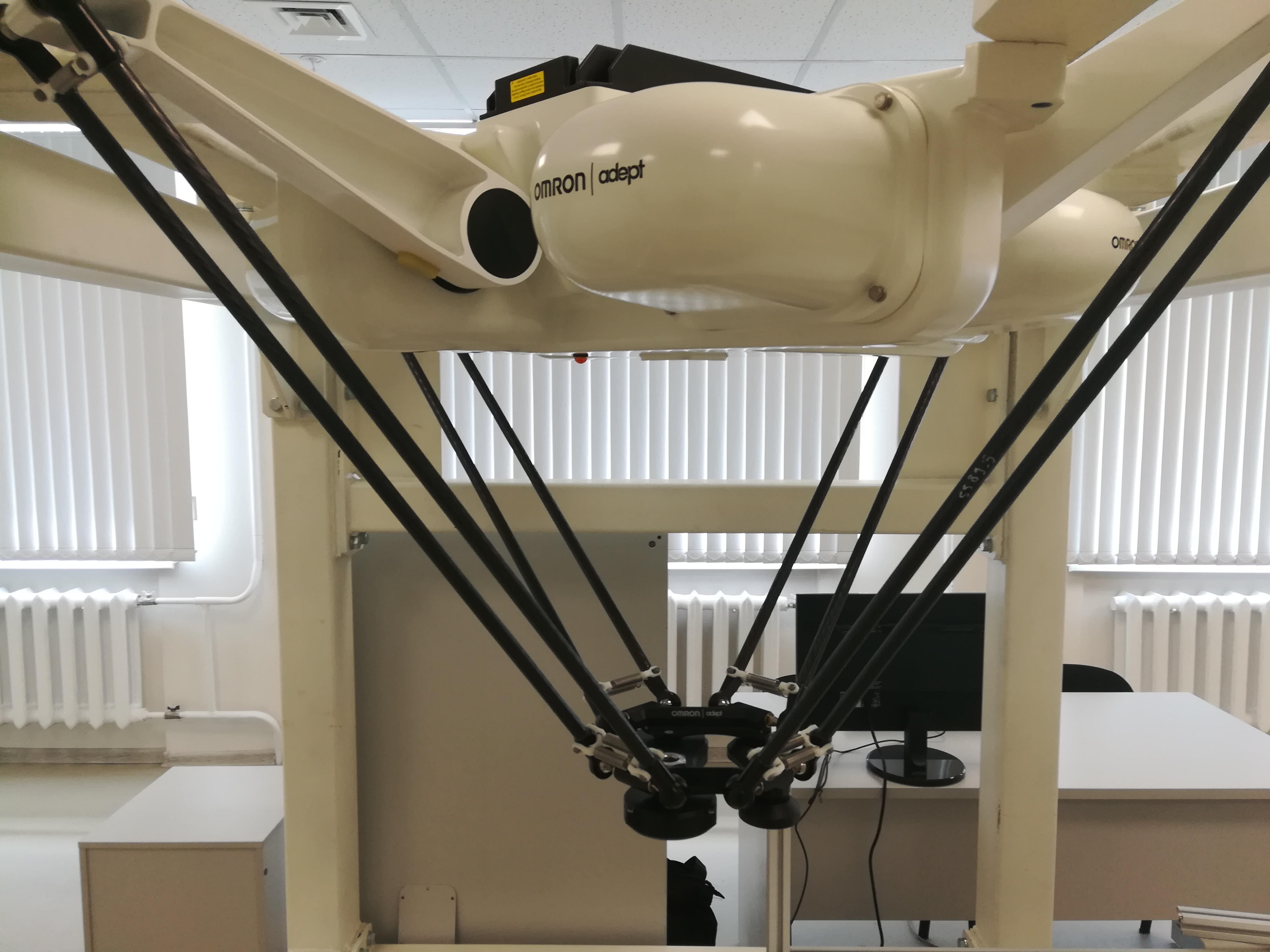
Базовым элементом робототехнической ячейки является промышленный робот с 185º вращением, 6 кг максимальной нагрузкой, 1300 мм диаметром рабочего пространства и 500 мм осью Z, под который мы разработали специализированную раму.
Робот служил тренировочной базой для наших инженеров. На нем провели большое количество экспериментов.
Робот дельта серии Quattro, отличается большой скоростью и точностью перемещения. Как правило, система с роботом включает в себя дополнительное оборудование и функции. Как элементы системы часто используется техническое зрение, измерительные датчики оптические и контактные.
Под различные продукты протестировали большое количество захватов: пневматических и механических.
У ВАС ПОХОЖАЯ ЗАДАЧА? ОСТАВЬТЕ ЗАЯВКУ И МЫ РАСЧИТАЕМ ПРОЕКТ
Нажимая на кнопку, вы даёте согласие на
обработку персональных данных в
соответствии с политикой
конфиденциальности
Похожие проекты
Маркировка Честный знак.
Молочная продукция
:
Проектирование и внедрение системы маркировки и прослеживания молочной продукции DM-кода Честный знак.
Ульяновская область
2021
Маркировка Честный знак.
Ветеринарные препараты
,
Корма для животных
:
Проектирование и внедрение системы маркировки на предприятии ООО "ВЕДА"
Московская область
2024
Маркировка Честный знак.
Упакованная вода
:
Проектирование и внедрение системы печати, нанесения, считывания DM-кода Честный знак
Республика Башкортостан
2022
Маркировка Честный знак.
Растительные масла
:
Сериализация линии подсолнечного масла. Маркировка
None
2025
Маркировка Честный знак.
Молочная продукция
:
Проектирование и внедрение системы считывания DM-кода. Республика Татарстан
Республика Татарстан
2022
Маркировка Честный знак.
Упакованная вода
:
Проектирование и внедрение системы считывания DM-кода
Самара
2021
Маркировка Честный знак.
Консервированные продукты
:
Внедрение системы маркировки на предприятии ООО "Домат-Д"
Белгородская область
2024
Маркировка Честный знак.
Упакованная вода
:
Проектирование и внедрение системы считывания DM-кода
Астраханская область
2021
Робототехнические ячейки.
Установка для паллетизации на основе коллаборативного робота Prompower R12 с подъёмной колонной
Республика Мордовия
2024
Маркировка Честный знак.
Безалкогольные напитки
:
Проектирование и внедрение системы по нанесению и считыванию DataMatrix кода, нанесению и контролю наличия этикетки на упаковке
Самарская область
2023
Маркировка Честный знак.
Упакованная вода
:
Внедрение на предприятии системы маркировки
Тюменская область
Маркировка Честный знак.
Растительные масла
:
Внедрение на предприятии системы маркировки DataMatrix кода на единичной продукции
Республика Татарстан
2024
Маркировка Честный знак.
Упакованная вода
:
Проектирование и внедрение рабочего места считывания групповой маркировки, на трех заводах группы компаний
Саратовская область
2025
Маркировка Честный знак.
Растительные масла
:
Внедрение системы маркировки Честный знак, ООО "ВГМЗ САРЕПТА"
Волгоградская область
2024
Маркировка Честный знак.
Смазочные материалы
:
Маркировка Честный знак. Агрегация. Смазочные материалы
Московская область
2025
Маркировка Честный знак.
Моторные масла
:
СИСТЕМА СЧИТЫВАНИЯ МАРКИРОВКИ. СЕРИАЛИЗАЦИЯ. АГРЕГАЦИЯ.
Калужская область
2025
Маркировка Честный знак.
Бакалейная продукция
:
СИСТЕМА НАНЕСЕНИЯ И СЧИТЫВАНИЯ МАРКИРОВКИ. СЕРИАЛИЗАЦИЯ. Товарная группа – бакалея. Соусы
Оренбургская область
2025
Робототехнические ячейки.
Лабораторная установка для паллетирования на базе коллаборативного робота
Самарская область
2024
Маркировка Честный знак.
Бакалейная продукция
:
Проект по внедрению системы маркировки в товарной группе «Бакалея». Соус
Московская область
2025
Маркировка Честный знак.
Бакалейная продукция
:
Проект по сериализации в товарной группе «Бакалея»
Волгоград
2025
Подобрать оборудование
Продвижение и разработка
сайта lemurteam.ru